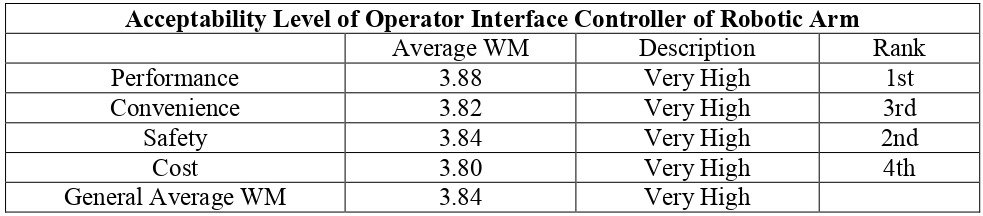
Acceptability Level of Operator Interface Controller of Robotic Arm
Keywords:
Automation, Human Machine Interface, Programmable Logic Controller, ProgrammingAbstract
The main purpose of this study was to design, assemble and assess the Acceptability Level of the Operator Interface Controller of Robotic Arm. It is a device that provides students an experience identical to an actual work in the industry. Through the use of this device, the student will gain knowledge and ideas on the operation of robotic arm, Programmable Logic Controller, Human Machine Interface programming, and the learning competencies of the students will be enhanced. The researcher believes that developing the device addresses the diverse needs of learning material in automation and industrial process control. The study utilized the experimental research design in the assembly of the device. Various trials and errors were done until the device was 100% functional. Questionnaire was given after the experiment for the acceptability level to gather the necessary data. The level of acceptability of the Operator Interface Controller of Robotic Arm gained an average weighted mean of 3.84 with the description “very high”. The performance of the device was rated the highest with weighted mean of 3.88. Second was the safety with weighted mean of 3.84 which means device was adequately assembled and guarantees safety. Convenience was rated third, which was described as "very high, and has an average weighted mean of 3.82. However, cost ranked the lowest with an average weighted mean of 3.80 since the materials used in constructing the device were of guaranteed quality. Based on the findings, the researcher conclude that the Operator Interface Controller of Robotic Arm was highly acceptable by the respondents in terms of performance, safety, convenience, and cost.
Published
How to Cite
Issue
Section
Copyright (c) 2022 Authors

This work is licensed under a Creative Commons Attribution 4.0 International License.