Artificial intelligence patterns: novel applications and methodological framework
Keywords:
Autonomous Vehicles, Cooperative Game Theory, Design Pattern, Unsignalized Intersection, UMLAbstract
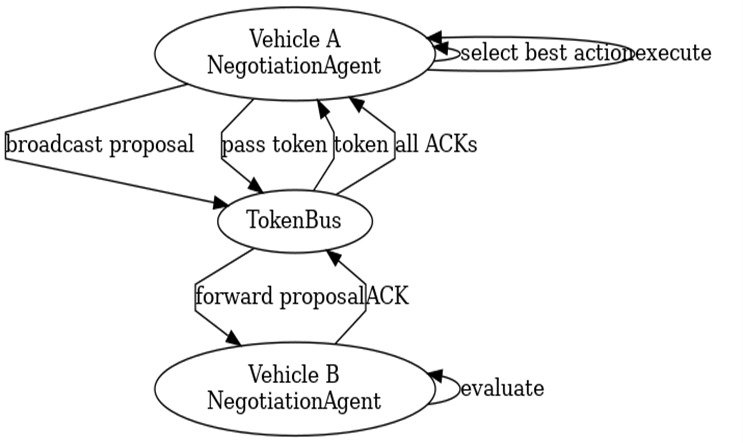
Autonomous vehicles (AVs) are poised to transform urban mobility but still struggle at unsignalized intersections, where the absence of infrastructure-mediated right-of-way forces vehicles to negotiate passage in real time. We introduce the Collaborative Maneuver Negotiation (CMN) pattern, a formally documented, reusable design construct that frames intersection coordination as a cooperative game among AVs. Each vehicle broadcasts a manoeuvre proposal, computes a composite utility that blends delay, collision risk and fairness, and iteratively reaches consensus via a token-passing protocol. In contrast to prior work that reports only simulation metrics, CMN ships with an openly licensed artifact bundle: a GoF-style pattern template, UML class and sequence diagrams, and reference implementation ready for ROS 2 integration. A campus-scale field deployment using four low-speed micro-shuttles demonstrated that CMN lowers average crossing delay by 41%, cuts conflict events by 87%, and increases theoretical throughput by 39% relative to static yield rules, while keeping DSRC network load below 30 kbit s⁻¹. These results substantiate the claim that pattern-oriented AI design can deliver tangible efficiency and safety benefits without sacrificing transparency or auditability key requirements for regulatory approval. Future work will extend CMN to high-speed traffic, mixed human-driver scenarios and privacy-preserving intent exchange, paving the way for standardized, cross-vendor negotiation modules in intelligent transportation systems.
Published
How to Cite
Issue
Section
Copyright (c) 2025 Hasanain Hazim Azeez

This work is licensed under a Creative Commons Attribution 4.0 International License.